





本文來自:智造調查局,作者:民生證券李哲、趙璐
■馬斯克宣佈將於近期發佈人形機器人原型機,一石激起千層浪。關於人形機器人是否必要、有何價值、應用場景、放量節奏、技術方案的討論此起彼伏。本文力圖提出我們的思考和測算。
■人形是機器人的最大公約數。工業機器人推出已半個世紀,但到2019年全球人均保有量僅3.63台/萬人,仍是汽車、家電、3C等標準化製造行業的“獨享”。初級的智能水平、難以遷移的應用環境是制約產業規模的瓶頸。服務機器人曾點燃曙光,但其過於細分的應用場景仍不能擺脱工業機器人曾經的窄路。人形機器人以其親和力、易接受的標準化形式,更易打破廠用、商用、家用的藩籬,實現極大規模硬件複製和長尾應用的廣泛覆蓋,孕育偉大公司。
■人形是最自然的商業入口。商業入口一直是平台企業的必爭之地。商業地產、手機、汽車正在或者即將擔當我們的商業入口,最大限度地佔據我們的時間、吸吮商業價值。更加智能的人形機器人會是我們的好助理、好朋友,是最天然的商業入口,沒有科技企業可以忽視。不斷湧入的資金、人才、技術會加快技術的迭代演進,產業大勢已不可阻擋。
■首台樣機,不必生而偉大。第一度電的發出,第一列火車的啟程都引發了人們對其實際用途的質疑,但逐步提升的性能提升了實用性,消弭了質疑。神經網絡算法、語音語義識別、更先進的傳感、執行技術都在為人形機器人誕生奠定基礎。此時不應被實用性限制,而應更加寬容,允許一個有缺點的新產品誕生。
■放量節奏,不宜過度樂觀。人形機器人面對開放的應用環境,難以通過簡單的編程和短時間的遍歷達到足夠的智能,需要一定時間的完善。特斯拉Model系列及純電動車的放量節奏可以作為參考,萌芽期不宜對放量節奏有過高期待。
■執行機構,進入大市場,孕育新的技術變革。人形機器人的使用,倍數放大了執行機構的市場空間,且其更有限的機構放置空間、更大的單位體積輸出功率要求、更低的成本,都給執行機構的設計提出了新的挑戰。新技術、新工藝有望得到應用,抓住機會的廠商有望彎道超車。
■伺服系統、諧波減速器是執行機構的核心。立足當前的技術發展現狀,我們認為人形機器人會採用開源的控制系統,視覺為主的傳感方案、工業塑料或鋁合金等輕質材料為本體。驅動-電機-減速器組合會是執行機構的首選方案,在成本中佔比最高,成為人形機器人普及的最大受益方。
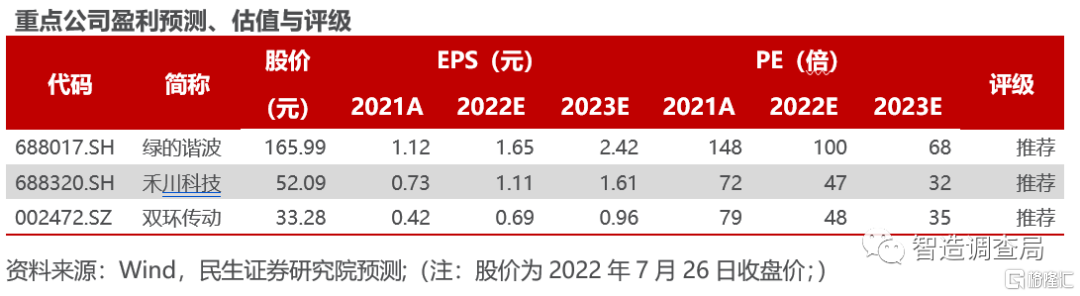
■投資建議:預重點推薦禾川科技、綠的諧波、雙環傳動。建議關注三花智控、匯川技術、鳴志電器。
■ 風險提示:新產品研發及拓展不及預期風險,下游需求不及預期風險,市場競爭加劇風險,宏觀經濟增速放緩風險。
01
人形機器人,產業趨勢還是曇花一現?
1.1 特斯拉發佈Bot,掀起人形機器人熱潮
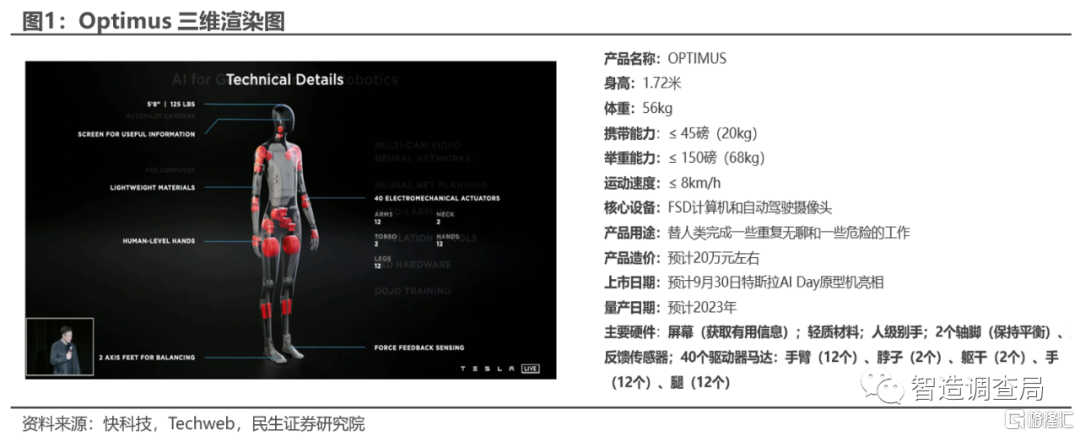
在2021年的Tesla AI Day 上,馬斯克公佈了人形機器人Tesla Bot(Optimus)的概念。近期,馬斯克又將原計劃8月19日舉辦的特斯拉AI日,改為9月30日舉辦,因為屆時將發佈Optimus(“擎天柱”)原型機。
據官方描述,特斯拉 Optimus 機器人身高約 172CM、體重約 56KG,能夠硬拉 68KG 左右,它的誕生是為了消除危險、重複和無聊的任務,以便人類可以專注於更加愉快的工作。長期以來,馬斯克對人工智能發展的危險性和缺乏監管的狀態直言不諱,但他向外界保證 Optimus 是友好無害的,特斯拉機器人的速度被特意設計得很慢,最高時速約為 2 米/秒,並且比人類更弱。
據稱,該款人形機器人結合了特斯拉的AI技術,即基於視覺神經網絡神經系統預測能力的自動駕駛技術,具有極強算力的DOJO D1超級計算機芯片,Dojo 架構擁有一個大規模計算平面,極高寬帶和低延遲。作為 Dojo 架構的重要組成部分,D1 芯片採用 7 納米制造工藝,處理能力為每秒 1024 億次。由於每個D1芯片之間都是無縫連接在一起,相鄰芯片之間的延遲極低,訓練模塊最大程度上實現了帶寬的保留,配合特斯拉自創的高帶寬、低延遲的連接器,算力高達9PFLOPs(9000萬億次)。
1.2 人形機器人,各項用途的最大公約數
中國電子工業學會將機器人劃分為工業機器人、服務機器人、特種機器人三類。
其中,1)工業機器人指面向工業領域的多關節機械手或多自由度機器人,在工業生產加工過程中通過自動控制來代替人類執行某些單調、頻繁和重複長時間作業;2)服務機器人是指在非結構環境下為人類提供必要服務的多種高技術集成的先進機器人;3)特種機器人指代替人類從事高危環境和特殊工況的機器人。
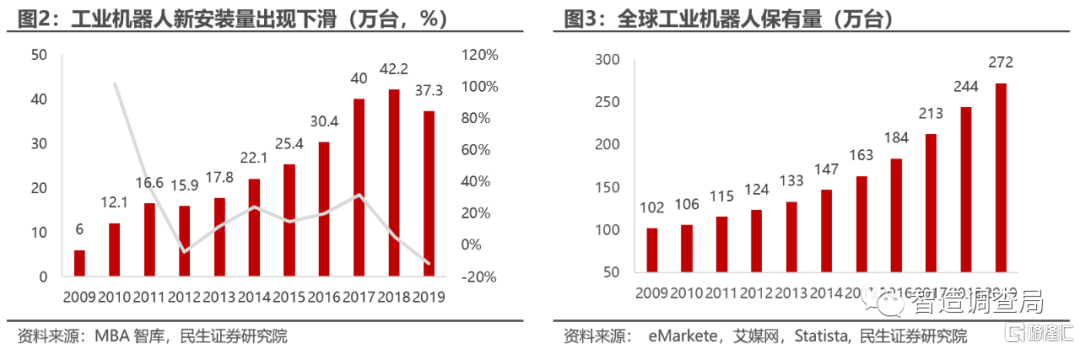
目前,全球機器人發展已有超過半個世紀,但據IFR數據,2019年全球工業機器人保有量僅272萬台,按照世界人口網數據2019年全球230個國家75億人口計算,工業機器人的人均保有量僅為3.63台/萬人。2019年,工業機器人受全球貿易摩擦升級影響,新安裝量出現下滑,據IFR預計,到2022-2023年才可能恢復至疫情前水平。相比之下,服務機器人、特種機器人因疫情催化“非接觸”使用場景增加,發展勢頭迅猛。
回顧過去幾十年發展歷史,工業機器人發展速度遲緩,除了受宏觀經濟影響外,還與其初級的智能水平、難以遷移的應用環境有關。傳統工業機器人主要是解決傳統制造業的效率問題,在靜態、結構化、確定性的無人環境中完成重複性作業,其工作特點在於空間相對隔離、與人非接觸、預編程或示教再現控制、需要外部安全保障。伴隨製造業本身的升級和轉型,小批量、多品種、短週期、個性化將成為新興製造業的顯著特點,因此工業機器人的趨勢也將是可融入人類生產與生活環境、與人優勢互補、合作互助,進而成為具備可變作業能力的人類助手型機器人。
機器人最終需要在人類所處的現實環境中工作。開發人形機器人比修改整個環境顯得更經濟合理。現代社會的環境是為人類自身設計的,例如,走廊的寬度、階梯的高度、扶手的位置和門把的位置等數不勝數的事物都要適合人的尺寸和運動,這些是社會建造過程中的沉沒成本。因此,當機器人具有人的形狀並能像人一樣活動時,就不需要為機器人而改變人的環境。常見的輪式機器人使用條件苛刻,需要在一個非常平的地面上來使用,沒有任何的越障能力,這種理想的工作環境其實是非常少的。如果要想滿足它豐富功能的話,還是要做成一個有自主越障能力,所以人形是一個好的選擇。
1.3 下一代的商業入口
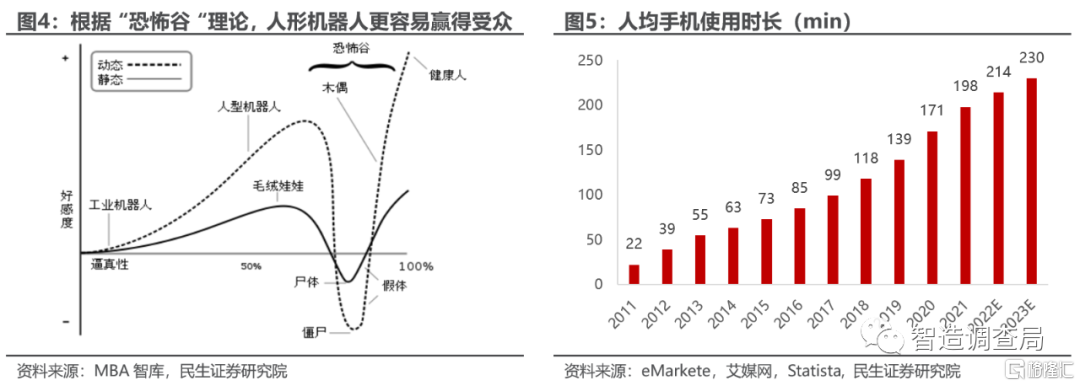
人形機器人較其他服務機器人更容易被人們接受。參照“恐怖谷效應”,在中等程度偏上的逼真性以前,無論是靜態仿真物還是動態仿真物,人們對它的好感程度是隨逼真性的提高而增加。也就是説,中等偏上程度的仿真時最受人們歡迎的,最能夠贏得受眾。而隨着逼真性向較高程度增強,人們的好感度會陡然下降。在“恐怖谷理論“第一段曲線上升部分,人類與人形機器人更容易產生情感上的交流。人形機器人在外形和行為設計上模仿人類,具有手部、足部、頭部和軀幹等,容易獲得人類好感、親近感並能滿足情感認同。並且它們與人類接近程度越高,被接受和認可的程度就越高,具有人的外形是機器人成為人類夥伴併為人們帶來樂趣的非常重要的因數。
人形機器人有望成為繼手機、汽車後的又一入口,商業價值巨大。手機入口整合了通話、地圖、工作、娛樂等眾多功能,是各功能依託的總入口。而人形機器人功能更加全面,與人互動場景多元更加多元,有望成為新的商業入口。根據艾媒網、Statista數據,2021年我國人均花費在手機上的時間達到3.3小時/天。此外,2021 年移動應用的用户支出達到1700億美元(約合1.08萬億人民幣),與去年相比增長了19%。下載量以同比 5% 的速度繼續增長,達到 2300 億次。
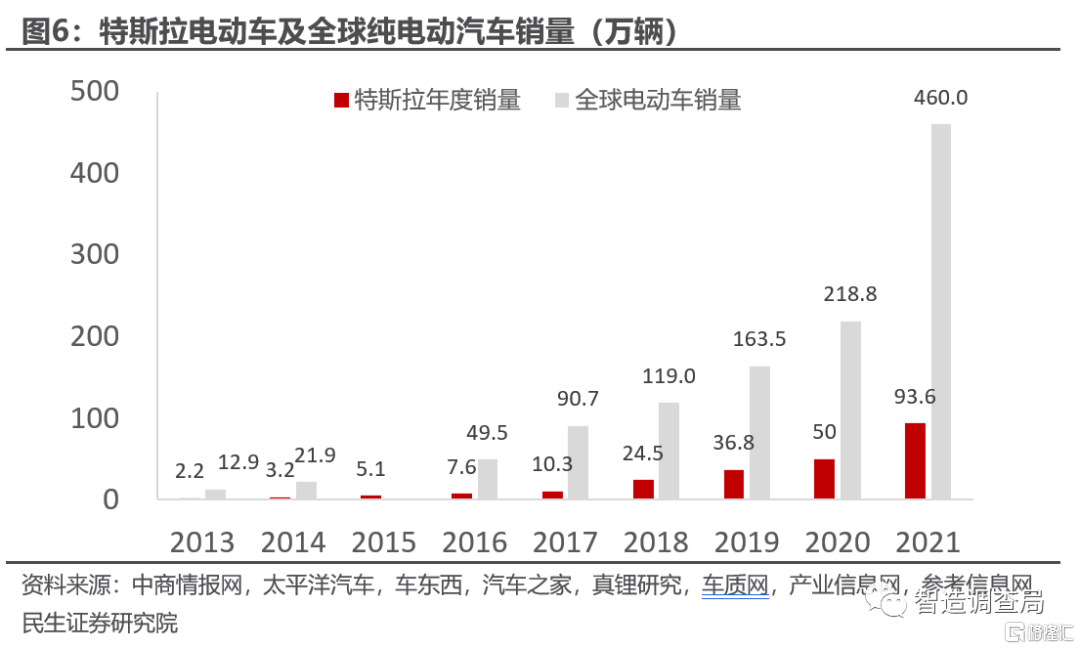
展望人形機器人的未來發展速度,我們認為可以參考特斯拉電動車的放量節奏。回溯歷史,Model-S在2012年推出,2013年特斯拉電動車銷量達到2.2萬輛,2014年達到3.2萬輛,2015年實現5.1萬輛。隨着2017年推出Model-3達到大規模生產,銷量快速增長,從2017年的10萬輛快速增長到2021年的近100萬輛。我們認為,特斯拉汽車銷量的絕對額增長是從Model-3的推出開始加速,起初走的是高端概念型路線,往往是忠實粉絲開始應用,同時蒐集各種數據進行改進,然後逐步起量。我們認為人形機器人的發展過程可能也與此有相似之處。
不同的是,對於人形機器人,其他科技企業會更快地跟進,國內與國外科技企業都紛紛注意到這個賽道,在做前瞻佈局。一些領先企業在做準備,明年也將推出,因而真正放量時不僅要考慮特斯拉,其他國內外企業也會放量。如果人形機器人的放量節奏類似於特斯拉汽車,那麼2023-2024年人形機器人可以大致對應特斯拉2013-2014年的銷量,隨着其他廠商原型機推出後也逐步起量,2025年開始人形機器人對標2015年全球純電動車銷量。
但對於9月30日發佈的機器人,我們認為不應抱有過高的預期,原因在於人形機器人對智能化水平、通信、執行、傳感等方向的要求非常高,最終較為理想的人形機器人一定是經過多次迭代,不斷打磨後的產品。而特斯拉bot的到來,其最重要的意義在於開啟了整個產業的快速發展過程,未來一段時間,預計很多科技企業都會向人形機器人的方向努力,爭奪賽道,產業趨勢可能會加速來到我們面前。
02
Optimus的前輩們
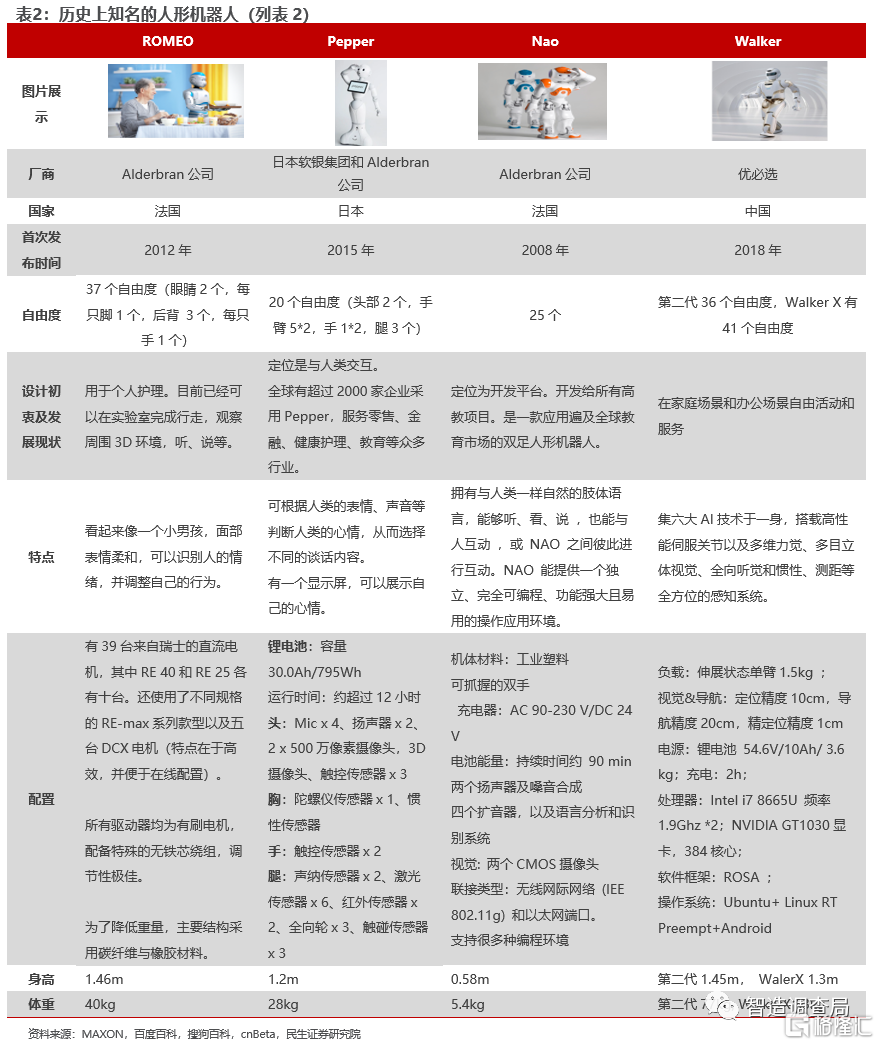
Tesla Bot並非首款人形機器人,從21世紀初本田發佈首款人形機器人AISMO原型機開始,全球多家科技公司及高校先後發佈人形機器人。從設計初衷來看,人形機器人定位多用於生活服務,與人類交互,以及專門用於科研領域。其中,較為知名的不乏有波士頓動力的Atlas機器人、歐洲iCUB、軟銀的Pepper、Alderbran公司的Nao機器人,以及優必選Walker系列。研究他們的設計思路,對Optimus也會有所借鑑。
從配置上看,雙足服務型機器人自由度均在40個左右,多的可以達到50以上,電源採用鋰電池,續航時間短則1-2h,長的可以達到十數個小時,電機均採用直流電機,全身配備數十個甚至上百個傳感器,本體結構多采用碳纖維、工業塑料等輕質材料,或對質感、觸感有要求的橡膠等。

03
人形機器人的可能解決方案有哪些?
3.1 人形機器人的成本構成與工業機器人有哪些區別?
從外形上看,人形機器人採用的是L型結構,每個關節緊密連接,其集成度要比傳統的工業機器人更加緊湊,也更加靈活。而從成本上構成上看,二者也有一定的差異。
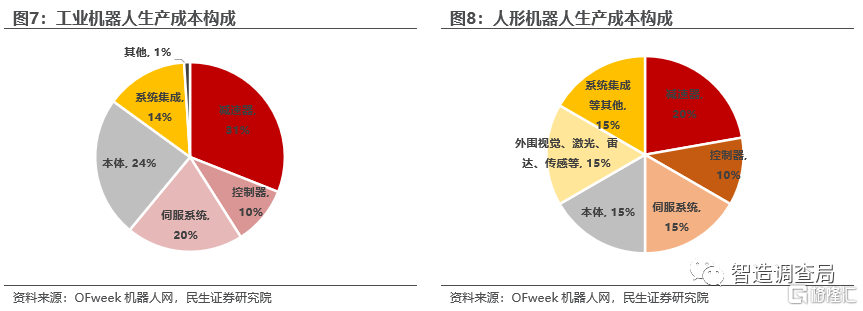
傳統的工業機器人產業鏈,包括上游零部件供應商、中游本體供應商、下游系統集成和服務提供商,以及終端應用市場。其中有減速器、控制器、伺服系統分別佔31%、10%、20%。本體佔比在24%,系統集成約佔比14%。
相比之下,根據我們的產業鏈調研,人形機器人的本體在成本中佔比要低於工業機器人。由於工業機器人對負載的要求更高,通常需要用到鑄鐵、高強度鋼等金屬材料製作,而人形機器人通常採用密度更小的金屬材料,或者複合材料製作,其本體在整個生產中的佔比通常在15%左右,而工業機器人本體在生產成本中佔比通常在20%以上。在傳感方面,人形機器人全身需要多處傳感器,因此在生產成本中也佔有較高的比重。
3.2 驅動和執行:諧波減速器+空心杯型伺服電機
3.2.1減速器:諧波減速器或為主要解決方案,減速器數量或在45-50個
從外形上看,人形機器人採用的是L型結構,每個關節緊密連接,其集成度要比傳統的工業機器人更加緊湊,也更加靈活。而從成本上構成上看,二者也有一定的差異。
減速器是常用作原動件與工作件之間的減速傳動裝置,在二者之間起到匹配轉速、傳遞扭矩的作用。其原理在於,把高速運轉的動力通過減速機輸入軸上齒數少的齒輪齧合輸出軸上的大齒輪,以此來達到減速的目的,原因在於絕大多數工作件負載大、轉速低,不適宜用原動機直接驅動,需通過減速機來降低轉速、增加扭矩。常見的減速器有行星齒輪減速機、RV減速機、諧波減速機等。
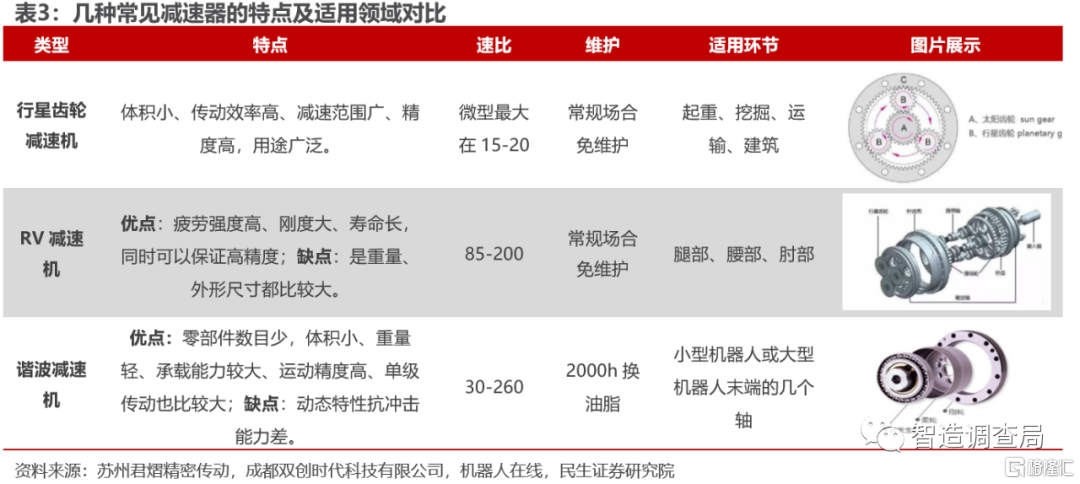
工業機器人大多使用RV減速器,主要原因在於RV減速器具有疲勞強度大、剛度大,同時可以保持高精度等特點,但其缺點是重量大、體積大。另外,部分末端會用到諧波減速器,諧波減速器的負載能力略低於RV減速器,在力矩輸出要求不是特別高的末端可以滿足要求,其優點是體積小、重量輕。
人形機器人關節處的減速器需要具有傳動鏈短、體積小、功率大、質量輕、易於控制等特點。根據公開報道,Tesla Bot體重約為125磅(56.7千克),負載20kg,也可可通過劇中硬拉姿勢舉起150磅的重物(約68千克),考慮到人形機器人的集成度要求較高,以及其負載要求,諧波減速器基本可以滿足人形機器人的要求。根據我們的產業鏈調研,一般的諧波減速器減速比在85-160之間,更大一些的可以達到200,而減速比直接決定了輸出力的大小,減速比越高,電機相同轉數下輸出力越大。體積方面,手指部分可以使用直徑20mm的減速器,放置於手掌中,肘部可以使用30-40mm減速器,肩部可以使用50-60mm減速器。目前,國內諧波減速器基本可以滿足要求。
事實上,在機器人移動一個物體的過程中,真正需要輸出力較大的地方主要在於肩部、肘部、腕部等關節,手指等末端關節對力的要求有限,因此部分末端可以使用行星齒輪減速器替代。根據我們的產業鏈調研,行星齒輪減速器的轉速比通常在15-20之間,如果要實現更大的力,只能將齒輪縮小,但齒輪過小時很容易損壞。因此,在體積很小的機器人中,通常可以使用行星齒輪減速器,但要做到消費級機器人,僅可以在末端使用行星齒輪減速器替代諧波減速器。體積方面,諧波減速器由於其結構通常是由三個行星齒輪,以及中間的一個太陽輪組成,因此最小的也只能達到30-40mm。
對消費級機器人而言,其負載通常不會過大。因為負載較高的情況下,其肩關節、肘關節需要做到很大。另外,機器人本身也需要保持平衡,機器配重不足的情況下很容易傾倒,考慮到其在運動過程中還要加上力和慣性,所以一般要保證機器人靜態下的負重是動態負重的2倍左右。
另外,在精度方面,消費級機器人的精度不會像工業機器人那麼高,在加入編碼器的情況下可以達到0.01mm,只要執行到位即可,相比之下,工業機器人,比如加工機牀精度需要達到0.002-0.005mm。
那麼,機器人全身需要多少個減速器?
根據我們的產業鏈調研,人形機器人的減速器一般不少於40個。具體數量主要取決於手指數量、手腕彎曲度、腿部彎曲度等。一般,指關節可以通過拉線、編碼器來完成,一根手指最多需要一個減速器,每隻手5個手指則需要4-5個減速器。因此,一般兩隻手臂、一個脊、每隻手5個手指的機器人其減速器數量大約在45-50個。
減速器的價格一般與其體積有關,一般直徑越大的減速器價格越高。由於機器人的自由度較高,全身的減速器數量也較多,因此在總成本中,減速器的佔比也要略高於工業機器人。
3.2.2減速伺服系統:電機驅動是主流解決方案
機器人自由度的運動,可能依靠舵機,電機,推杆,氣或者液壓的伸縮杆,控制器可以對這些部件進行控制。
從過往人形機器人的伺服解決方案可以看出,Atlas採用了液壓驅動,其優點在於可以承受高負載。例如在Atlas完成後空翻動作時,落地時衝擊力會非常大,如果採用電機方案,可能會導致爆炸,而液壓結構更加穩定,除了油壓自身的可壓縮性,如果使用蓄能器,還能起到減震作用,使肌體更有彈性。但液壓肢體結構的問題在於可能會漏油。此外,Poppy機器人則選擇了舵機驅動,實際上,舵機也相當於一個完整的伺服系統,裏面包含了電機、傳感器、伺服控制器等部件,其優點是價格低廉、結構緊湊,但缺點是精度很低,位置鎮定能力較差,只能滿足一些機器人的初級功能需求。因此除此之外,歷史上對於負載沒有過高要求的人形機器人,大部分都採用了電機驅動方式。
從數量上看,按照歷史上已經發布的幾款人形機器人,頭部自由度一般至少有2-3個,每隻手臂有4-7個自由度,每隻手1-5個自由度,每條腿3-6個自由度,軀幹(腰部)2-3個自由度。根據澎湃新聞報道,預計特斯拉Optimus人形機器人的脖子、胳膊、手、腿、軀幹累計搭載了40個機電傳動器。基本與Walker和ROMEO的自由度數量相當。

機器人的伺服系統,包括伺服電機、伺服驅動器、指令機構三大部分。其中,伺服電機(server motor)是執行機構,指在伺服系統中,控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。伺服電機可使控制速度,位置精度非常準可以將電壓信號轉化為轉矩和轉速以驅動控制對象。伺服驅動器(server drives),又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的控制器,其作用類似於變頻器作用於普通交流馬達,伺服驅動器主要用於高精度的定位系統,一般通過位置、速度、力矩三種方式對伺服電機進行控制,屬於傳動技術的高端產品。指令機構是發脈衝或者給速度用於配合驅動器正常工作的。
伺服驅動器向電機線圈供應電壓、電流,然後通過監控反饋來閉環伺服環路,為伺服電機供電。多數情況下,伺服驅動器含有三個嵌入式伺服環路:電流環(扭矩環、內部換)、速度環、位置環,三個環路相互作用,實現精準的運動控制。
人形機器人的伺服系統解決方案是怎樣的?
從外觀上看,工業機器人的伺服系統體積較大,有部分機器人伺服系統外置,因此其集成度不比人形機器人。另外,工業機器人通常使用交流伺服電機,對精度要求更高、體積更大,而人形使用的是直流無框力矩電機,可以在較小體積下輸出較大的力,而且沒有外框,只有一個轉子、定子。
從組成上看,人形機器人的伺服電機、驅動器、編碼器、減速器等集成在一起,整體組成一個“空心杯”形狀的集合,整個杯形的集合體有輸入端、輸出端,通過一根總線、一根電源線,跟控制器聯繫在一起。由於人的手臂、軀幹都是圓形,因此做成杯形更利於本體的安裝。一般,人形機器人每個關節都要一個杯形的集合體,一個手指上面需要一個電機,手指上各關節可以通過拉線的方式,利用槓桿原理實現彎曲。此外,人形機器人各伺服系統之間是採用串聯方式,工業機器人一般採用並聯方式。

伺服系統的設計一般根據機器人應用場景而定,例如機器人的身高、體重、負載等。由於驅動器是圍繞關節設計,因此需要根據機器人的需要的力反過來進行推算。另外,電力系統的功率輸出最後決定了力的輸出,因此執行電機的電流也要據此進行設計。
根據我們的產業鏈調研,一般驅動器和後端輸出的力的比值應在1.2-1.5倍,之所以保證一定的餘量,主要是防止機器人的某個部位被卡住時,電機繼續執行,電流達到最大可能會對電機、驅動器造成的傷害。一般解決的方式可以採用逆反饋、電流的反饋,加入一些智能算法,反饋給控制器,保證機器人某個部位被卡住是不會燒壞電機和驅動器。
伺服系統的難點主要在於,從驅動器上看,其上端需要對接控制器,下端需要對應電機,由於各廠家控制器參數不同,且後端驅動功率、應用範疇、便長城、執行選項等參數較多,如何能夠實現通用性、兼容性,並通過讓客户能夠快速選項是一個挑戰。另外,人性格機器人由於對集成度的要求較高,剎車、編碼器等都在電機中,是通過總成的形式插入到減速器中,進而連接成一個本體。因此,數量龐大的部件中任何一個出現問題,或者母線出現問題,執行機構就無法正常運轉,進而影響整機的性能。
特別需要注意的是,對於頸關節、肩關節、肘關節、腕關節、腰關節、膝關節、踝關節等大關節來説,可採用標準的電機組合形式。對於手部關節,空間狹小、要求較高,可選方案較多:
1)雙手28個關節均採用微機電系統;
2)雙手10根手指均採用微型電缸控制,電缸可放在手掌空間;
3)無名指、小指、中指聯動,採用微型電缸控制。
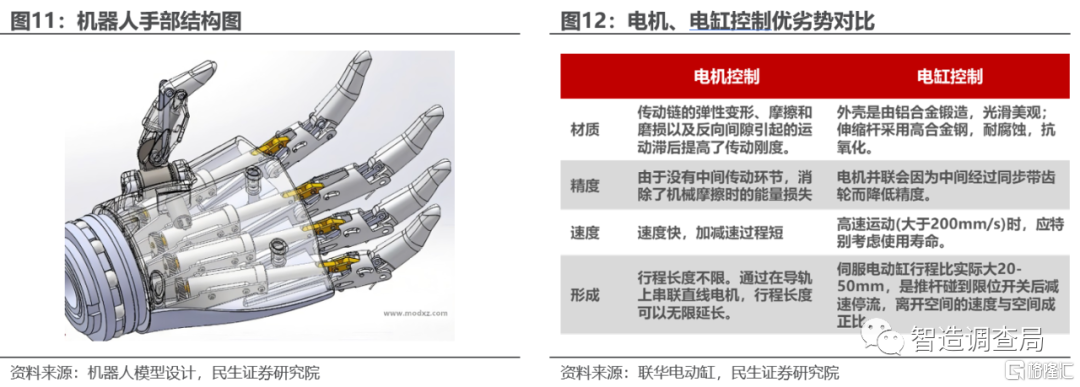
總體上看,採用微型電機進行控制精度更高,一般額定轉速能達到2000-3000mm轉,及時性更好,加減速都較快,普遍在幾十毫秒一下,且可承受三倍餘額定轉矩的負載,但電機沒有防油防水功能,無法再高適度和油侵嚴重環境下使用,相比之下,電缸的耐腐蝕性比較好,但其精度不如電機。
3.3 控制系統:獨立控制器位於頭部或軀幹,開源系統或為多場景應用解決方案
運動控制器的作用,是對來自伺服迴路的各種反饋信息進行處理,並據此對電機進行換向。運動控制器與伺服驅動器是經常被混淆的兩個概念,實際二者在自動化領域有着微妙的差異。簡言之,運動控制器相當於人的“大腦”,伺服驅動器相當於“神經”,而伺服電機相當於人的“手”執行由大腦、神經傳遞過來的命令。
作為基於微處理器的設備,運動控制器具有生成脈衝寬度調製(PMW) 波形的複雜算法。而伺服驅動器內的功率晶體管,通過傳輸電流和電壓波形,來為伺服電機供電。因此,二者之間的配合原理是,控制器是將特定命令應用於驅動器中位置、速度或電流環等元件,伺服驅動器再根據控制器的命令向電機提供電壓和電流。
此外,控制器通常具有編程的功能,可以存儲和運行程序員提供的代碼,其中有大量安全元件,可用於組件發生故障時防止過載,或停止運動控制。相比之下,驅動器往往專注於接收控制器輸入的命令,並負責功率晶體管的開關,使產生的電流、電壓滿足命令的要求。
工業機器人的驅控一體在人形機器人中很難實現。原因在於人形機器人的伺服驅動器數量高達數十個,因此,如果所有驅動器都配有一個控制器,整個機器人的體積將會非常大,很難實現。因此,人形機器人一般有一個單獨的控制器(獨立於伺服電機、伺服控制器),也被稱作“上位”。通常人形機器人的控制器會被放在頭部,如果視覺、激光雷達、聽覺傳感器等佔用空間過大,控制器也可能被放置在軀幹中,因為軀幹中除了電池之外,還有很大空間可以利用。
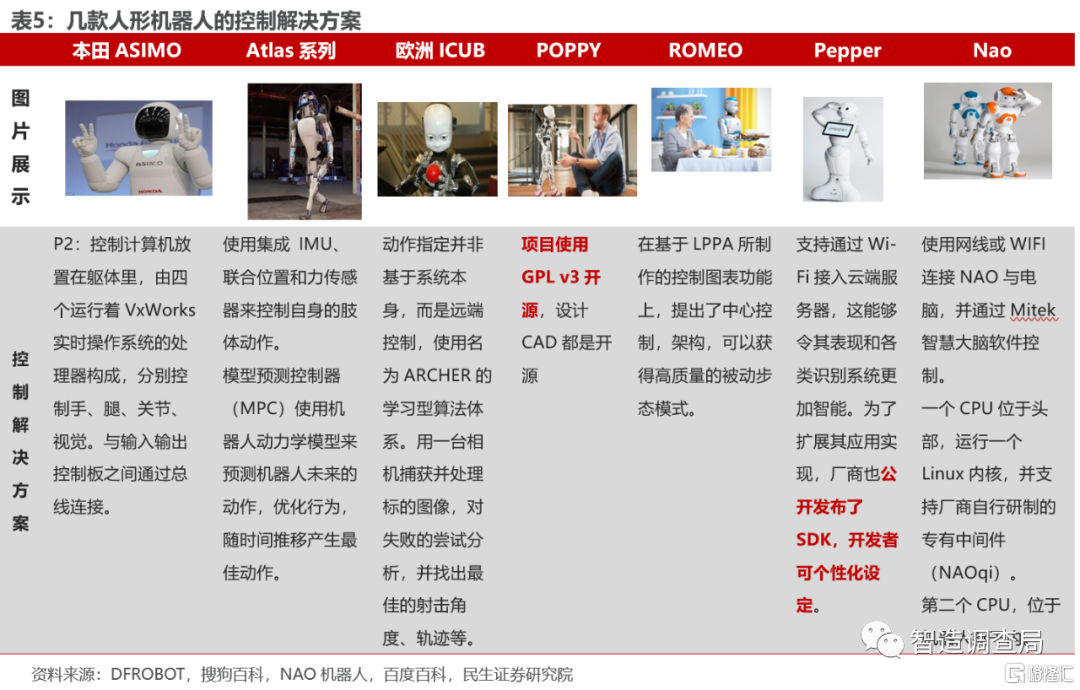
對於人形機器人的控制器而言,其關鍵主要在於瞭解客户的應用場景,以及對相關工藝的要求。由於終端對精度要求,每向上一級疊加都需要留出一定的餘量,因此驅動器對於最終精度的實現有至關重要的作用。此外,工業機器人一般只有一個固定底座,只有末端有一些視覺識別過程,相比之下,人形機器人的傳感器眾多,數據來源有多個口徑,需要處理的數據也很龐大和複雜,難度較大。另外,由於機器人對每個場景的學習和訓練過程也需要一定時間,因此,單獨一家廠商還很難將人形機器人做到各個場景的通用。
一種可能的解決方案是,廠商主要負責生產本體,將控制部分做成開源系統,讓不同的人對應用場景進行二次開發,這樣特斯拉人形機器人就有可能成為一個標準版的本體,在其能力範圍內,由後端的多樣化算法來支持多個客户應用場景,例如Poppy機器人、Pepper機器人。
3.4 本體+視覺控制等外圍:本體材料輕量化,傳感技術或仍以視覺為主
3.4.1本體:輕量化的複合材料、金屬材料為首選,對觸感要求高的部位或採用硅膠
本體在整個機器人中屬於輔助部分,主要起到支撐、連接各個關節的作用,在整個機器人成本佔比中也是最低的,原因在於相比內部的核心部件,外部的損傷是較易於修復的。
人形機器人本體在成本中比重要低於工業機器人。由於負載的要求,工業機器人的本體一般需要由鑄鐵、高強度鋼製成。相比之下,人形機器人的本體一般採用密度更小的複合材料,或密度更小的金屬材料,如鋁硅、鋁鎂等,其密度比合金鋼更小,但強度、支撐能力也能夠滿足負載的要求,關鍵是材質相對更軟,可塑性更好。除此之外,有些機器人的本體也會採用碳纖維,在保證橫端拉力的情況下,質量也較輕。而在手指等末端、對質感和觸感要求較高的部位也會採用硅膠作為材料。

此外,一些機器人的關鍵零部件,可能會採用工業級3D打印技術。如歷史上法國INRIA Flowers研發的Poppy機器人就是一種3D打印機器人,3D打印可以降低機器人本體重量,並減輕伺服電機等關鍵部件的壓力,從而降低成本,並實現快速製作。另外,像波士頓動力的Atlas機器人關鍵結構件也是使用工業級3D打印製作,驅動器和液壓管路是被嵌入結構當中,所有的動態平衡、傳感、過濾、排污閥、動力裝置所需的一切零件,都集成在一個3D打印部件中而非由單獨的組件製成。

3.4.2 傳感:仍以視覺傳感為主,或引入工業級雙目/多目相機
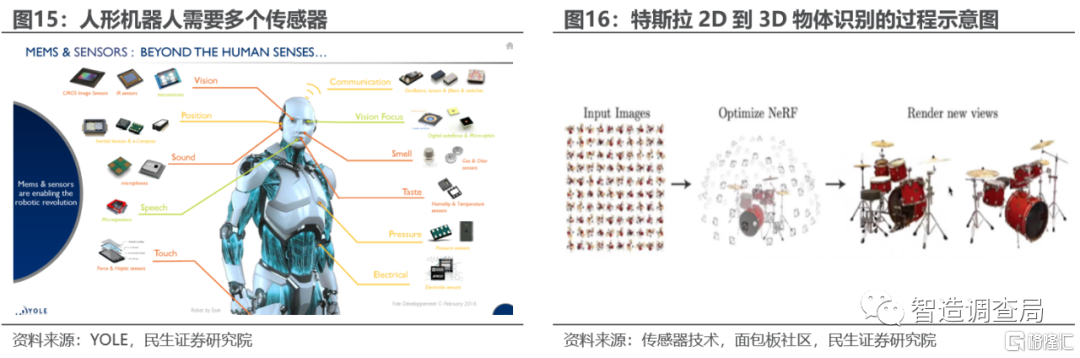
與人相同的是,人形機器人也需要很多傳感器。根據檢測對象的不同,可以分為內部傳感器、外部傳感器。內部傳感器一般用來檢測機器人本身狀態,多為檢測位置和角度的傳感器。
外部傳感器一般用來檢測機器人搜出環境裝款,如物體識別傳感器、物體探傷傳感器、接近覺傳感器、距離傳感器、力覺傳感器、聽覺傳感器等。

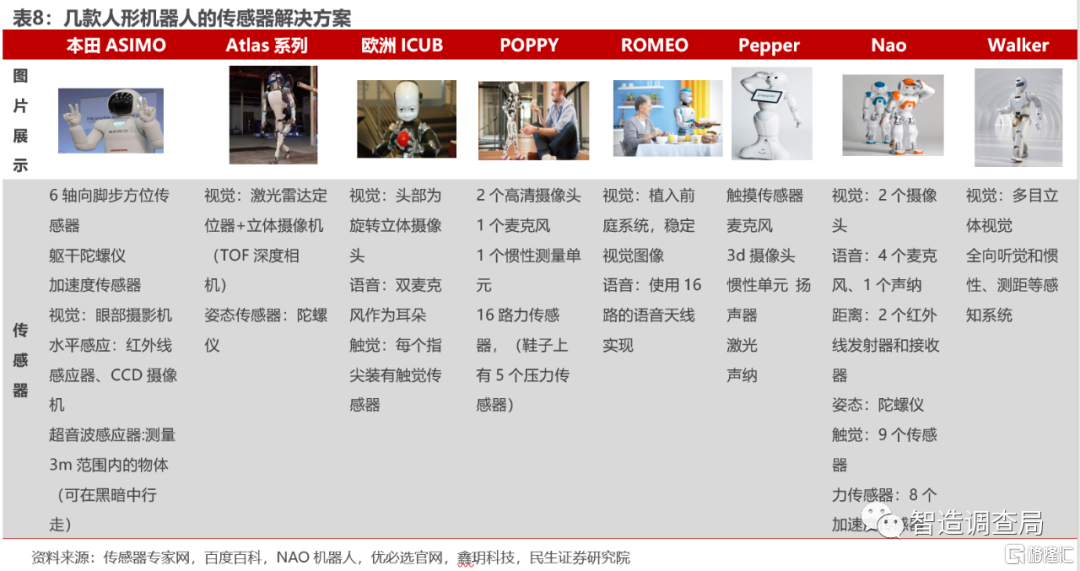
從已經發布的幾款人形機器人來看,視覺、語音、觸覺、力覺、測距、姿態等需要基本都需要配備相應的傳感器,傳感器的數量少則十數個,多則上百個(如Nao機器人)。一般視覺傳感多采用雙目或多目的高清攝像頭、立體攝像機,姿態傳感器採用陀螺儀,探測器包括激光雷達、聲納、超音波感應器等,語音識別多以麥克風形式。
據中國傳動網,特斯拉即將推出的“擎天柱”人形機器人運用了特斯拉最先進的AI技術,其頭部配備了與特斯拉汽車相同的智能駕駛攝像頭,內置FSD芯片,並基於視覺神經網絡神經系統預測能力的自動駕駛技術驅動,與汽車共用AI系統。這意味着,特斯拉人形機器人延續了以視覺為主的傳感技術路線。特斯拉最著名的 AI算法是其機器視覺中的純視覺解決方案,預計該算法在人形機器人的製造中將延續。
由於人形機器人不僅需避障、路徑規劃,還需要準確識別目標,因此若要完成類似人手的精密操作,機器人視覺系統定位精度需達毫米級,需引入工業級雙目/多目相機,單機價值量相對普通服務機器人較高。預計人形機器人的3D傳感器成本將遠高於普通的服務機器人,但要略低於工業機器人。此外,激光雷達通常會作為視覺傳感的輔助,因為在機器人工作過程中,很多物體都是“眼見為虛”的,需要借用激光雷達對景深進行驗證。
除視覺之外,人形機器人還需要加入力傳感器,例如對於一個玻璃製成的物體輸出的力,不能等同於對一個氣球輸出的力,而力的大小最終由電流決定,因此加入力學傳感和反饋也是必要的。相同的,還有對温度、位置的感知。
3.5 散熱:風冷、散熱器散熱、導熱材料+新興散熱解決方案
由於要面對大量信息,大量的動作,人形機器人運算量非常大,其所有的元件都在發熱,因此,散熱也是研製人形機器人需要解決的最重要問題之一。
在設計機器人時,通常需要通過各種軟件的模擬來實現,儘可能讓其少發熱,或發熱相對更集中、更易於散熱,這就需要用到一些工程軟件。此外,在散熱方面,一般有風冷、液冷、散熱器、導熱材料等方式。
以風冷為例,機器人的散熱結構呆滯包括,表面的機器外殼、內部排氣扇,外殼下部設置有進氣孔,外殼的上部設置有排氣孔,排氣扇用於使空氣由進氣孔進入外殼內部,並由排氣孔排出。由於進氣孔接近散熱結構的最低處,排氣孔位於散熱結構的最高處,熱空氣由排氣孔排至散熱結構外。在此情況下,散熱結構內形成低壓,外部的空氣經進氣孔進入散熱結構內。冷空氣接觸設置於外殼內部的電路板組件,達到散熱效果。
除了空冷之外,機器人的散熱也需要配合其他方式。一般,主板控制器結構上會根據發熱源位置安裝散熱器,但是,由於發熱源於散熱器間會出現空襲,因此必須將導熱界面原材料彌補在其中傳導熱量,目的是清除空隙中的氣體、增加換熱範圍、降低傳熱係數、提升散熱性能。導熱硅膠片是常見的導熱界面原材料之一,一般將其組裝在機器人處理芯片與散熱器或機殼中間。導熱硅膠片具有高導熱性、質地綿軟、有延展性、壓縮率等特點,因此可以密切迎合在芯片和散熱器中間,增加換熱效率。此外,導熱硅膠片還有優良的絕緣性、使用方便、不易損耗等特點。
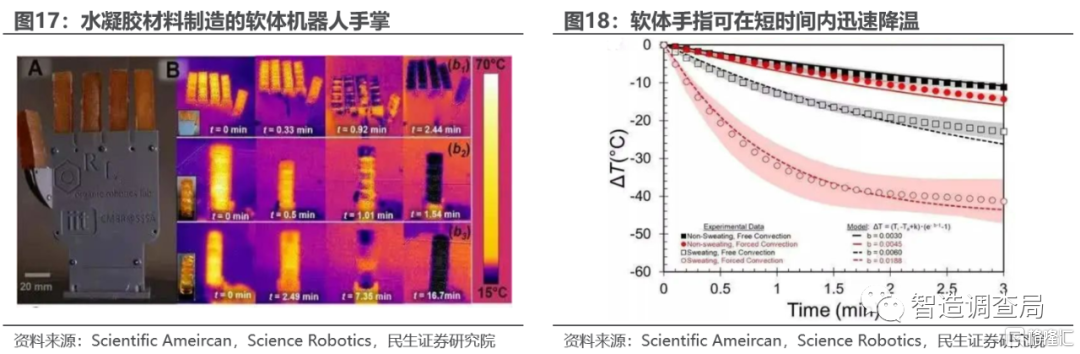
除了傳統的散熱方式之外,目前也有科研機構在不斷探索更加類人的散熱機制,比如“排汗”。康奈爾大學的謝菲德研究團隊開發了一種更利於柔性機器人的散熱方式。由於柔性機器人很多部件都是由複合材料製成,其散熱性能不如金屬,而風扇燈內部散熱技術佔空間較大,重量也較大,因此,謝菲德發明了機器人的“排汗系統”。
研究團隊通過多材料立體光刻技術,發明機器人“排汗”所必須的納米聚合物材料,該技術可以通過光將樹脂類材料固化為設計好的形狀。研究團隊利用兩種水凝膠材料開發製造了手指形狀的驅動器,這種水凝膠具有蓄水功能,而且可以根據温度來調節水分,相當於一個“智能海綿”。當温度達到30攝氏度以上時,由水凝膠製成的驅動器底層會隨着温度上升而收縮,從而將水擠壓到頂層,頂層由聚丙烯酰胺支撐,密佈着微米級的小孔,與地層相同,當温度高於30攝氏度時,為空會自動打開,開始“排汗”。該研究團隊表示,該排汗系統可讓驅動器表面在30秒之內下降21度,散熱效率畢人體排汗系統高三倍,若由風扇燈外置風冷設備,其散熱效率還可提升六倍。但該機器人也有一定的缺陷,即移動性較差,而且補水也是一個問題。
3.6 電池:三元鋰電池或為主要解決方案
機器人的電池主要有鎳氫電池、鋰電池、鉛酸蓄電池三類。其中,鎳氫電池主要用於成本控制嚴格,不需要大容量和大電流放電、安全性要求較高的玩具機器人、掃地機器人等領域。鉛酸蓄電池技術較鋰電池更為成熟,但由於比較笨重,移動不方便,基本用於不需要移動的機器人領域,由於污染較為嚴重,正在逐漸被鋰電池取代。
鋰電池主要應用於智能服務機器人、娛樂經紀機器人、探險排爆等特種用途機器人領域。一般,對於成本不敏感的機器人,切要求電池較輕、可提供大電流放電、保障長使用壽命的機器人一般會選擇聚合物鋰電池,如競技機器人、特種機器人。
磷酸鐵鋰在不需要電池大電流放電、低温性能的AI服務機器人、工業較大型機器人領域應用較多。三元鋰電池相比聚合物電池成本更低,且能量密度較磷酸鐵鋰電池更大,在機器人領域應用較為廣泛,尤其是18650鋰電池。

人形機器人電池的配重和續航市場如何?
從發展歷史上看,幾款較為知名人形機器人主要經歷了外部供電、電池供電兩個發展階段。電池供電普遍採用鋰電池組,其安裝的位置最初普遍採用“揹包”形式,後逐漸將電池內置。從續航時間上看,大部分雙足的人形機器人的連續工作時間都在2小時以內。然而,根據我們的產業鏈調研,目前機器人的價格主要停留在展示和實驗階段,若實現大規模商業化,其續航時間應達到3-10個小時不等。

目前,人形機器人普遍採用三元鋰電池。相比汽車主要採用的磷酸鐵鋰電池,三元鋰電池的電流密度更高。由於人形機器人需要在有限空間和體重情況下滿足更大的動力續航。壽命方面,雖然三元鋰電池的循環使用壽命不如磷酸鐵鋰電池,但目前已有多款消費級人形機器人,如Nao,Walker X均可實現電池的拆卸和組裝,因此電池的更換已經可以實現。

除了最基本的供電功能之外,人形機器人還要考慮到電池的配重問題,保證身體的平衡。以48千克的本田ASIMO機器人為例,其電池重量約為6kg,約為體重的1/8左右,優必選Walker X機器人的電池重量約為3.6kg,約為體重的5.7%。
但前文提到,目前的幾款知名人形機器人主要停留在展示和實驗階段,因此電池做到越輕量越好。而根據我們的產業鏈調研,若要實現大規模商業化,其帶電量和續航可能有更高的要求,相對應地,一般電池重量應占到人形機器人重量的1/3左右。根據OFweek鋰電網,目前磷酸鐵鋰電池的能量密度一般為150Wh/kg,三元電池的能密度約為200Wh/kg。假設特斯拉人形機器人體重56kg,電池重量佔比1/3計算,則其鋰電池重量約為18.7克,若採用三元鋰電池,則帶電量約為3.73Wh,續航時長在3.73-7.47小時,若採用磷酸鐵鋰電池,帶電量約為2.8kWh,續航時間在2.8-5.6小時。

此外,由於目前所有的人形機器人都是直流驅動,用48V、24V、12V的總線將電機、控制器串起來,通過電源分配器分配電流,因此,還要考慮電池的動態管理問題。有些人形機器人由於沒有剎車,在電量耗盡的時候會倒下,因此當電量快要耗盡的時候需要預留一些餘電在其中,以供機器人回到原位。
04
人形機器人市場空間有多大?
對人形機器人銷量的假設:關於人形機器人市場規模,我們認為可以參考特斯拉電動車的放量節奏。回溯歷史,Model-S在2012年推出,2013年特斯拉電動車銷量達到2.2萬輛,2014年達到3.2萬輛,2015年實現5.1萬輛。隨着2017年推出Model-3達到大規模生產,同時達到平價水平,銷量快速增長,從2017年的10萬輛快速增長到2021年的近100萬輛。我們認為,特斯拉汽車銷量的絕對額增長是從Model-3的推出開始加速,起初走的是高端概念型路線,往往是忠實粉絲開始應用,同時蒐集各種數據進行改進,然後逐步起量。我們認為人形機器人的發展過程可能也與此有相似之處。
不同的是,其他科技企業跟進地會更快,國內與國外科技企業都紛紛注意到這個賽道,在做前瞻佈局。一些領先企業在做準備,明年也將推出,因而真正放量時不僅要考慮特斯拉,其他國內外企業也會放量。
這裏,我們假設2023-2024年人形機器人對應特斯拉2013-2014年的銷量,隨着其他廠商原型機推出後也逐步起量,2025年開始人形機器人對標2015年全球純電動車銷量。由於2015年全球純電動車銷量數據的確實,這裏我們假設2025人形機器人的銷量為30萬台,2026-2030年對應2016年全球純電動車銷量。
對人形機器人單價的假設:據觀察者網報道,馬斯卡在接受採訪時表示,預計擎天柱量產後,其成本比汽車要更低,售價約為2.5萬美元(約合人民幣16.74萬元)。這裏我們假設2023年價格為25萬元,每年降低2萬元,到2027年價格降低至17萬元。預計到2025年人形機器人市場規模將達到630億元,到2030年達到3720億元。
對各個零部件市場規模的測算:按照前文提到的,減速器、伺服系統、控制器在人性機器人中的佔比計算,可以分別測算出三個對應的市場規模,預計到2025年人形機器人減速器、伺服系統、控制器市場規模分別達到126億元、95億元、63億元,到2030年,市場空間分別達到744億元、558億元、372億元。
對人形機器人電池市場規模的測算:根據我們的產業鏈調研,一般1kWh對應鋰離子電池成本約為1800-2500元,根據前文我們測算,預計在三元鋰電池解決方案下,特斯拉機器人的帶電量約為3.73kWh,假設以成本加成定價,起初毛利率在100%,則預計2023年擎天柱對應電池單價約為1.6萬元,假設此後每年價格下降10%。預計到2025年,人形機器人電池市場規模約為39億元,到2030年約為167億元。

05
相關標的
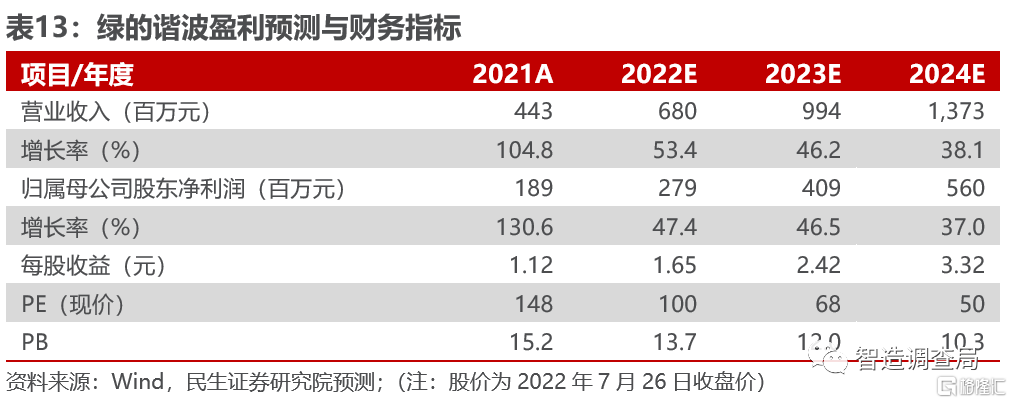
5.1 綠的諧波
公司是一家專業從精密傳動裝置研發、設計、生產和銷售的高新技術企業,產品主要包括諧波減速器、機電一體化執行器及精密零部件。公司的產品廣泛用於工業機器人、服務機器人、數控機牀、醫療器械、半導體生產設備、新能源裝備等高端製造領域。
經過多年持續研發投入,公司在國內率先實現了諧波減速器的工業化生產和規模化應用,打破了國際品牌在國內機器人諧波減速器領域的壟斷。憑藉多年來在精密傳動領域的積累,公司在行業內已經建立了較強的品牌知名度,成為國內領軍企業之一。我國諧波減速器行業處於成長期階段,市場成長迅速,雖然我國已成為全球最大的工業機器人市場,但以精密諧波減速器產品為代表的核心零部件總體供給量存在較大缺口,隨着行業內企業規模化生產的實現與下游工業機器人等產業的快速發展,未來行業規模將持續擴大。
投資建議:預計公司2022-2024年實現歸母淨利潤2.79、4.09、5.60億元,對應EPS分別為1.65、2.42、3.32元/股,維持“推薦”評級。
風險提示:產品研發不及預期風險,技術泄密風險,核心技術人員不足或流失風險
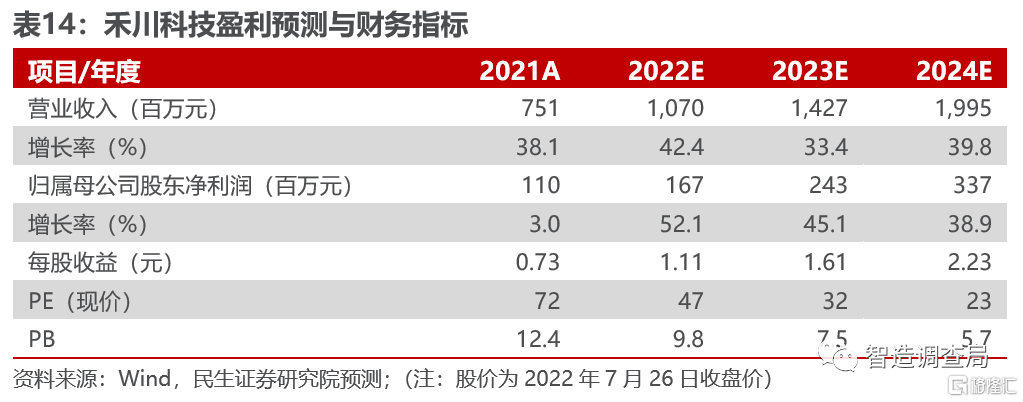
5.2 禾川科技
公司是一家技術驅動的工業自動化控制核心部件及整體解決方案提供商,主要從事工業自動化產品的研發、生產、銷售及應用集成。一家技術驅動的工業自動化控制核心部件及整體解決方案提供商,主要從事工業自動化產品的研發、生產、銷售及應用集成。
工業控制自動化新星,深耕OEM市場多年,多領域市佔率領先。公司多年來深耕OEM市場,服務廣大OEM客户廠商,獲得了極佳的產品方案性能 口碑,在光伏、3C、鋰電與機器人等行業具備極高的佔有率,通過多年來的高速發展,禾川科技已赫然進入國產自動化一線品牌方陣。
伺服系統頭部企業,國產替代領導者。伺服系統是當前禾川科技的核心產品,產品包括伺服系統內的伺服驅動器、伺服電機和編碼器,廣泛應用於機器人及機械手、3C、光伏、物流、包裝、紡織等多個行業。2021年伺服系統營收共計6.59億元,佔禾川科技主營業務89.72%。PLC產品2021年營收3996.28萬元,佔主營業務收入5.44%。
投資建議:預計公司2022-2024年實現歸母淨利潤1.67、2.43、3.37億元,對應EPS分別為1.11、1.61、2.23元/股,維持“推薦”評級。
風險提示:市場競爭加劇風險,宏觀經濟些下滑風險,技術研發或市場推廣不及預期風險。
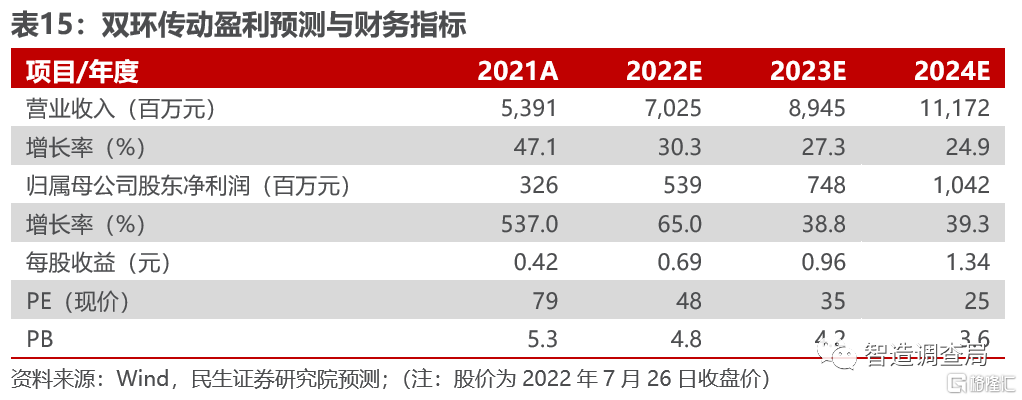
5.3 雙環傳動
公司專注於齒輪傳動產品製造,目前產品主要為為乘用車齒輪、商用車齒輪、工程機械齒輪、減速器及其他產品。齒輪產品應用領域非常廣泛,其市場規模主要取決於下游應用領域的市場需求。
緊抓成長賽帶,優化業務結構。隨着新能源汽車滲透率的不斷提升,相關齒輪的需求迎來了快速增長。公司提前戰略佈局,產品已應用在下游多種新能源汽車中,覆蓋了純電動汽車、混合動力汽車等。經過多年耕耘,公司已與全球領先電動車製造企業、重點新能源車企和電驅動製造廠商形成戰略合作並實現批量出貨。
機器人產業保持增長態勢,中國芯引領國產替代。得益於久經市場檢驗、完善的產品譜系、合理的市場策略以及及時的保障服務,公司子公司環動科技與國內主流機器人企業保持穩定的戰略合作關係,機器人高精密減速機業務獲得高速發展。環動科技密切地關注國內外重點新客户、新領域所需產品的開發與導入,全方位加速新產品的驗證速度。針對中大負載工業機器人所需,提前佈局設備與產線以滿足多方客户所需,目前已逐步實現6-1000KG工業機器人所需精密減速器的全覆蓋,產品譜系得到進一步完善,獲得了核心客户的認可並持續批產增量,從而實現減速機產銷連續兩年創歷史新高。
投資建議:預計公司2022-2024年實現歸母淨利潤5.39、7.48、10.42億元,對應EPS分別為0.69、0.96、1.34元/股,首次覆蓋,給予“推薦”評級。
風險提示:市場競爭加劇風險,宏觀經濟些下滑風險,技術研發或市場推廣不及預期風險。
5.4 三花智控
公司是全球最大的製冷控制元器件和全球領先的汽車熱管理系統控制部件製造商。目前主要產品包括四通換向閥、電子膨脹閥、電磁閥、微通道換熱器、Omega泵、括熱力膨脹閥、電子膨脹閥、電子水泵等,廣泛應用於空調、冰箱、冷鏈物流、新能源汽車等領域。
立足熱管理產品,拓展業務邊界。公司堅持“專注領先、創新超越”的經營戰略,以熱泵技術和熱管理系統產品的研究與應用為核心,專注於冷熱轉換、温度智能控制的環境熱管理解決方案開發。公司製冷電器零部件空調電子膨脹閥、四通換向閥、電磁閥、微通道換熱器等產品市場佔有率全球第一。近年來,新能源車的發展已成為確定的趨勢,這對熱管理產品提出了更高更多更新的需求。公司定位於新能源汽車熱管理系統領域,由零部件切入並逐漸向組件和子系統發展,已成為法雷奧、大眾、奔馳、寶馬、沃爾沃、豐田、通用、吉利、蔚來等客户的合作伙伴。
人形機器人即將來臨,三花智控有望突破。特斯拉將於推出9月份推出人形機器人,得益於公司在新能源汽車上同特斯拉的合作,公司有望突破人形機器人產業。由於人形機器人需要大量重複的運動,因而其電機功率較高。而機器人工作電壓在20-40V之間,需要更高的電流以實現功率的增加。隨着電流的增大,電機放出的熱量將成指數級上漲,如果不能進行良好的熱管理,電池、電機、關節的壽命都將受到極大的影響。公司三花汽零注入後,充分發揮與業務間協同效應,深耕汽車新能源車熱管理系統部件研發,並積極佈局熱管理組件和子系統在汽車領域更深層次應用,車用電子膨脹閥、新能源車熱管理集成組件、Omega泵等產品市場佔有率全球第一。未來公司有望在人形機器人領域復刻公司在新能源汽車業務中的發展,成為全球知名的人形機器人熱管理系統供應商。
5.5 匯川技術
匯川技術是國內伺服電機的領軍企業。主要為設備自動化/產線自動化/工廠自動化提供變頻器、伺服系統、PLC/HMI、高性能電機、傳感器、機器視覺等工業自動化核心部件及其工業機器人產品,為新能源汽車行業提供電驅&電源系統,為軌道交通行業提供牽引與控制系統。公司產品可應用於工業領域各行各業。根據睿工業數據統計,2021年公司通用伺服系統在中國市場份額達到16.3%,首次超越外資品牌,獲得市場份額第一名(前四名廠商及市佔率分別是:匯川,16.3%;安川,10.5%;松下,9.6%;三菱,8.8%)。
根據公司2021年年報,公司在工業機器人領域產品包括SCARA 機器人、六關節機器人、視覺系統、高精密絲槓、控制系統等整機及零部件解決方案,下游行業涵蓋3C 製造、鋰電、硅晶、紡織等。SCARA 機器人是一種圓柱座標型的特殊類型的工業機器人,適用於平面定位、垂直方向裝配等作業。六關節機器人是一種六個關節都可以轉動的機器人,適合用於諸多工業領域的自動裝配、噴漆、搬運、焊接等作業。
公司在 SCARA 機器人領域的主要競爭對手為 EPSON、YAMAHA 等,在六關節機器人領域的主要對手為安川、ABB 等。公司的工業機器人核心部件除減速機外,電控系統、伺服系統、絲槓、本體均已實現自制,具有較好的成本控制和定製化能力。憑藉對下游行業工藝的深刻理解以及“核心部件+整機+工藝”解決方案的競爭優勢,公司工業機器人產品在手機制造、鋰電、硅晶等行業已實現大批量銷售,形成了較好的品牌影響力。根據睿工業統計數據,2021 年公司 SCARA 機器人在中國市場的份額為14%,排在第三名,且為內資品牌第一名。在機器替人的大趨勢下,公司工業機器人業務有望充分受益,目前公司該項業務已實現盈利,屬於成長型業務。
5.6 鳴志電器
公司專注於運動控制領域和 LED 智能照明控制領域核心技術及系統級解決方案,生產產品主要包括傳感器、步進電機、直流電機、儀動傳感裝置等。
深耕控制電機及驅動系統業務,佈局新興高附加值應用領域。根據國外市場研究機構 IMARC Services Private Limited 的調研報吿,全球工業自動化服務 2021 年的市場規模為 1,816 億美元,預計 2027 年可達到 3,091 億美元,期間的年複合成長率約為 9.09%。2021 年我國工業自動化行業市場規模約為 1,920 億元。公司的控制電機及其驅動控制系統在 3C 製造設備、半導體加工設備、PCB/PCBA 製造設備、特種機牀、工業機器人、激光設備及數字化製造等工業自動化領域中運用廣泛。
公司移動機器人(商用及消費)類應用領域業務進一步快速增長,全年營業收入較上年同期增長約 99%。近年來,全球及我國的服務機器人市場規模高速增長。根據國外市場研究機構Interact Analysis 的統計數據,2020 年全球 AGV 銷售額為 12.684 億美元,AMR 銷售額為 10.903 億美元。公司及子公司安浦鳴志、美國 AMP、美國LIN、瑞士 T Motion、鳴志派博思均深度佈局於移動機器人行業,業務覆蓋商業移動機器人、AGV、AMR 等。
發佈首款運動控制器產品,進一步完善產品線。公司通過增強對海外子公司的一體化建設和賦能,發揮海外研發機構美國 AMP、瑞士T Motion 的技術研發優勢,強化產品的研發及技術迭代,進一步完善了步進系統、步進伺服系統、伺服系統和通用無刷驅動系統等平台化產品線。公司在 2021 年發佈了公司的第一款運動控制器產品,進一步拓展了公司在運動控制領域的產品平台的外延和夯實了公司運動控制解決方案級供應商的實力。









